Laboratorium
Harmonogram zajęć
Zasady BHP
Ćwiczenie 1: Podstawy konfigurowania i programowania urządzeń PLC/PAC
Ćwiczenie 2: Projektowanie i realizacja układów kombinacyjnych
Ćwiczenie 3: Projektowanie i realizacja układów sekwencyjnych
Ćwiczenie 4: Projektowanie i realizacja układów sekwencyjno-czasowych
Ćwiczenie 5: Modelowanie obiektów regulacji
Ćwiczenie 6: Synteza i parametryzacja struktur regulacyjnych
Ćwiczenie 7: Identyfikacja obiektów regulacji
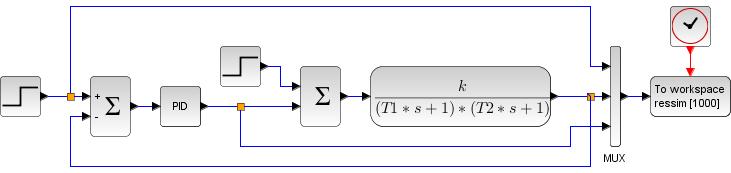
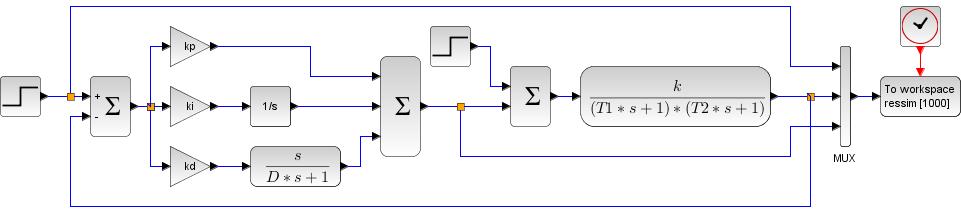
Ćwiczenie 8: Sterowanie z użyciem regulatora PID
Ćwiczenie 9: Modelowanie i symulacja serwomechanizmu
Ćwiczenie 10: Symulacja serwomechanizmu napięciowego
Ćwiczenie 11: Kinematyka prosta manipulatorów
Ćwiczenie 12: Kinematyka odwrotna, planowanie trajektorii





{kind=link}
{kind=link}
{kind=link}